
Abstract
The IAG (International Association of Geodesy) and the IERS (International Earth Rotation and Reference Systems Service) Joint Working Group (JWG) on “Modeling environmental loading effects for reference frame realizations” currently investigates the effect of correcting station positions for non-linear loading displacements on the realization of the International Terrestrial Reference System (ITRS). Another IAG/IERS JWG works on strategies for the frequent realization of single-technique and combined short-term reference frames, which are called epoch reference frames (ERFs). Both approaches are able to resolve the lack of parametrization which occurs when only taking linear velocities of geodetic observation sites into account (conventional parametrization). ERFs can account for any non-linear station motion (periodic signals, abrupt position changes, non-linear regional deformations, instrumental-related motions, etc.) on a regional as well as on a global basis.aaaa In this study, combined ERFs using the geodetic space techniques GPS, VLBI, SLR with different temporal resolutions (7-, 14- and 28-day) are compared to conventional multi-year/long-term realizations of the ITRS w.r.t. the datum stability and the ability to sample non-linear station motions. The 7-/14-day ERFs are able to monitor short-term station motions but the realization of the datum is not as stable as for the long-term reference frames. The 28-day ERFs have a more stable datum but are only able to monitor very slow long-term motions such as post-seismic deformations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 1 Introduction
Terrestrial Reference Frames (TRFs) nowadays are used for a broad variety of applications in geosciences and practice. In the geosciences, a precisely defined TRF is needed, e.g., for quantifying Earth rotation, geocenter motion, Earth gravity field, sea level rise, post-glacial rebound, tectonic motion and crustal deformation, atmospheric and hydrological loading, large scale deformations due to earthquakes and local subsidence. Practical applications are, e.g., surveying, engineering, mapping or geographical information systems (GIS).
The current official TRF realization of the International Earth Rotation and Reference Systems Service (IERS) is the International Terrestrial Reference Frame 2008 (ITRF2008) (Altamimi et al. 2011). It describes regularized station positions X R which are already corrected for geophysical effects like solid Earth and ocean tides (Petit and Luzum 2010). The ITRF2008 is a secular TRF, where the station positions are parametrized as a constant value X S at a reference epoch t 0 and a constant velocity \(\dot{X}\). This kind of TRF is called a multi-year reference frame (MRF) (Bloßfeld et al. 2014).
Since not all geophysical processes are known or can be modeled perfectly, X R moves not purely linearly over time (Bloßfeld et al. 2014). Examples for un-modeled effects include atmospheric or hydrological loading (Tregoning and van Dam 2005), the elastic response of the lithosphere due to mass variations in a flowing river system (Bevis et al. 2005) or, e.g., anthropogenic periodic effects due to groundwater withdrawal (Bawden et al. 2001). The neglect of these effects cause mis-modeled station positions in the current TRF realizations. To overcome this deficiency, in general three different possibilities exist:
-
Extended parametrization. In addition to the current linear model, parameters of periodic functions or splines can be estimated to account for the observed seasonal station position variations.
-
Improved geophysical modeling. Currently un-modeled effects like atmospheric or hydrological loading remain in the position estimates. The IAG (International Association of Geodesy) and IERS Joint Working Group (JWG) 1.2 “Modeling environmental loading effects for reference frame realizations” investigates approaches to model these effects and validate the results.
-
Frequent estimation of station positions \(\tilde{X}\). If the regularized station position is estimated frequently (e.g. every 1, 7, 14 or 28 days), the non-linear station motions are approximated automatically (Bloßfeld et al. 2014). This TRF realization is called an epoch reference frame (ERF). The IAG/IERS JWG 1.4 “Strategies for epoch reference frames” investigates strategies for the computation of the ERFs.
All these approaches are also investigated by the research group “Space-time reference systems for monitoring global change and for precise navigation” (FOR 1503) of the German Research Foundation (DFG) (Nothnagel et al. 2010).
In this paper, we discuss the frequent estimation of station positions. In total, four different time series of ERFs are computed with a different sampling interval. We compare a daily GPS-only solution and 7-, 14- and 28-day combined ERF time series with two consistent GPS-only and combined MRF solutions. All combined TRFs are based on a combination of the geodetic space techniques GPS, SLR and VLBI.
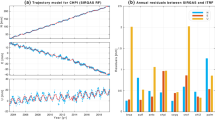
Figure 1 shows two examples of neglected non-linear station motions. Both examples show the absolute position change w.r.t. a mean coordinate. In addition to a linear velocity change following the Maule earthquake in 2010, the station ANTC (Chile) clearly shows a non-linear post-seismic behavior. This effect can last over decades (Freymueller 2010). Furthermore, the height component varies seasonally by about a few mm. In the case of the YAKT (Russia) time series, no clear seasonal behavior show up in any component. The station shows abrupt deflections up to 25 mm from autumn to spring due to the snow coverage during the winter months. If not manually removed, the snow could remain for months on the antenna (IGSSTATION email 365). This effect cannot be handled in global or regional models.

Absolute position changes in GPS-only weekly coordinate solution series for the stations ANTC (Los Angeles, Chile) and YAKT (Yakutsk, Russia) w.r.t. a mean position. The ANTC time series is taken from the website of SIRGAS (Systema de Referencia Geocéntrico para Las Américas; www.sirgas.org) (Sánchez et al. 2012), the YAKT time series was computed at DGFI
2 2 Epoch Reference Frames
This section describes the computation algorithm and the three different ERF solutions used for the analysis in Sect. 3. A much more detailed description of the used data, the datum realization, the LT selection and the processing strategy of the ERFs is given in Bloßfeld et al. (2014).
2.1 2.1 Computation Algorithm
The DGFI computation algorithm for global TRF solutions is based on the combination of different techniques at the level of normal equations (NEQs) (Bloßfeld et al. 2014; Seitz et al. 2012). A schematic overview of the computation algorithm is shown in Fig. 2. In the pre-processing, the input NEQs are solved and the time series of station coordinates are analyzed w.r.t. outliers and discontinuities. For the MRF computation, the pre-processed NEQs are accumulated per technique and station velocities are introduced. Then, the technique-specific NEQs are summed up by applying weighting factors of 1.0 for SLR and VLBI and 0.23 for GPS (due to corrupted stochastic model Bloßfeld et al. 2014), local ties (LTs) are introduced as pseudo observations and the geodetic datum is realized. Thereby, the origin is defined by SLR, the orientation is realized via a No-Net-Rotation (NNR) condition over a subnet of globally distributed GPS stations and the scale is a weighted mean scale of SLR and VLBI. The ERFs are based on identical NEQs. After the pre-processing, the NEQs of all techniques are summed up epoch-wise. Then, the LTs are introduced epoch-wise and the geodetic datum is realized in the same way as for the MRF. The combined MRF contains station coordinates, velocities and EOP. The combined ERFs contain station coordinates and EOP.

Algorithm for computing global TRF solutions from a combination of GPS, SLR and VLBI at the normal equation level at DGFI
2.2 2.2 Sampling of Non-linear Station Motions
The sampling interval of the station motions can be chosen freely. Since the standard SLR arc length is 7 days, we chose at least a sampling of 7 days. Additionally, we computed 14- and 28-day ERF solutions in order to investigate the effect of the sampling on the stability and quality of the TRFs. To compute the 14- and 28-day ERFs, the 7-day SLR arcs are combined. Within an ERF solution, the station position \(\tilde{X}\) is assumed to be constant. This means, that for a 28-day solution, the position error due to the secular motion of a station is larger than the error for the 7-day solution. An extreme value for this error can be computed, e.g., for the GPS station ISPA (Easter Island) in the ITRF2008 with a linear motion in x-direction of 4.9 mm in 28 days.
3 3 Comparison of ERF and MRF
All TRFs are validated w.r.t. DTRF2008 (Seitz et al. 2012) using 14-parameter similarity transformations for the MRFs and 7-parameter similarity transformations for the ERFs. The results (Bloßfeld et al. 2014) show that all TRFs are comparable to state-of-the-art TRFs as the ITRF2008 and DTRF2008. To compare the station coordinates and the datum stability of the ERFs, 7-parameter similarity transformations between the combined MRF and the combined ERFs are performed. In this study, we used a subnet of GPS stations (and a subnet of SLR stations) for these transformations since then, the transformation is the most stable (due to globally well distributed stations) and the network effect is limited. Furthermore, the GPS-based transformation allows to analyze the origin and scale transfer from SLR/VLBI to GPS. For all NNR conditions and similarity transformations, the same GPS subnet is used. The recently published paper (Bloßfeld et al. 2014) gives the transformation parameter time series of the weekly combined ERFs w.r.t. the MRF also for other space techniques. Figure 6 in Bloßfeld et al. (2014) shows the time series of the weekly transformation parameters (GPS subnet), the translation and scale parameters for the SLR-only ERFs and the scale time series for the VLBI-only ERFs. The transformation parameters (three translations/rotations, one scale factor) are equal to the common motions of all stations in the subnet (Sect. 3.1) whereas the transformation residuals are equal to individually station motions (Sect. 3.2).
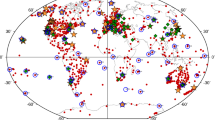
The datum stability of the subnets of the combined ERFs depends strongly on the spatial geometry of the technique-specific networks and on the number, quality and spatial distribution of the LTs. If only a few LTs are introduced in the combination, the RMS of a similarity transformation would increase and the network integration would be less stable (Seitz et al. 2012). The quality of the LTs is controlled by a selection process. Thereby, the 3D difference vector between the single-technique solutions is compared to the corresponding LT. If the difference is less than 30 mm, the LT is introduced with a weight of 1.0 mm in the combined NEQ. This selection process was adopted from the MRF computations at DGFI (Bloßfeld et al. 2014; Seitz et al. 2012). In future, this issue will be investigated also for the ERF computations in more detail. The amount of LTs and their global distribution depend indirectly on the length of the combination interval. The longer the combination interval is, the more dense is usually the global observing station network. Figure 3 shows the different number of LTs in the ERF solutions, the mean values are summarized in Table 1. For the weekly solutions, the station network is sometimes so sparse that not enough LTs (at least three are needed) between the techniques can be selected. The result is a NEQ which has a rank deficiency. For the 14-day solutions, the situation improves. At least three LTs are available between SLR and GPS and therefore, each NEQ is invertible. The small number of SLR-VLBI LTs can be compensated by the LTs of SLR and VLBI with GPS. This fact emphasizes the importance of GPS in the TRF computation. The most LTs are introduced in the 28-day solutions. Therein, on average three SLR-VLBI, 14 GPS-SLR and 15 GPS-VLBI LTs are introduced in the ERF solutions.

Number of LTs in the 7- (blue), 14- (red) and 28-day (green) ERF solutions (see also Fig. 3)
Figure 3 contains no information about the global distribution of the LTs. For example, if three LTs to link two techniques are only available in Europe, the number of LTs is enough to transfer the datum information between the networks but the spatial information is poor. Therefore, the estimated TRF would not have a stable datum and an outlier in the time series might occur.
3.1 3.1 Common Motions of Stations
Figure 4 shows the time series and spectra of the translations in x-direction between the combined MRF and the time series of combined ERFs (GPS subnet). Since the other parameters show a similar behavior, their time series and spectra are not shown. The time series shows an annual variation with an amplitude of 1.8 mm which can be identified in the spectra. The variation is caused by the fact that the MRF contains linear motions only, whereas in the ERFs, non-linear variations are allowed. A part of this variation is a common translation of the transformation stations (Bloßfeld et al. 2014). For the annual amplitudes of the weekly SLR-only time series, see Table 7 in Bloßfeld et al. (2014). The spectra in Fig. 4 clearly shows, that signals with frequencies below twice the computation interval cannot be sampled correctly. This means, the 7-, 14- and 28-day ERFs are not able to sample signals below 14, 28 and 56 days. Table 2 summarizes the annual amplitudes and phases of the time series of the translation and scale parameters for the three different combination intervals. The rotation parameters are not shown since the orientation was fixed by an NNR-condition to the a priori network. In the second-right column of Table 2, the scatter (RMS values) of each parameter time series, after the annual signal is removed, are shown. All translations have a significant (\(\vert A\vert> 3\sigma\)) annual variation with an amplitude between 1.7 mm and 2.7 mm. For comparison, the top-right column shows the RMS values for the weekly SLR subnet of the combined ERFs w.r.t. the combined MRF. The RMS values of the VLBI subnet are not shown here since the main datum information is transferred from SLR to GPS (for the weekly VLBI-only RMS values, see Bloßfeld et al. 2014). The amplitudes and phases of the 7-, 14- and 28-day solutions for each parameter agree very well (within their standard deviation). With an increase of the combination interval, also the datum stability of the SLR subnet increases. This fact proofs that a more stable datum of the combined ERFs is achieved by a better geometry. As a consequence of the improved network, the number of LTs increases ensuring a more stable datum transfer from SLR to the other networks.

Time series and spectra of the x-translations between the combined MRF and the time series of combined ERFs for different combination intervals based on a GPS subnet
3.2 3.2 Individual Motions of Stations
As an example for the individual station motions, Fig. 5 shows the transformation residuals for the GPS station YAKT for four different solutions (daily GPS-only and three combined ERFs). The geodetic datum of the daily GPS-only solution is realized in a different way than the datum of the combined ERFs. Since the major part of the datum differences is expressed by common motions to all stations, the spurious YAKT motions are individual station motions. Therefore, they are comparable to the motions of the combined ERFs and can be seen as a good approximation of the real station motion. By comparing the residuals, we can evaluate the combined ERFs for their ability to sample this motion. The 7-day solution gives the best approximation of the station motion.

Daily individual GPS-only (green) time series of the station Yakutsk. In addition, the 7- (blue), 14- (red) and 28-day (black) individual time series of the combined ERFs are shown. A longer time series of weekly GPS-only solutions w.r.t. a mean position is shown in the right panel of Fig. 1
The 14-day solution already causes errors of e.g. 10 mm in the east and height component at the epoch 2,005.85. The 28-day solution is not able to sample the variations between 2,005.7 and 2,006.0 in any component (error increases to 20 mm). Nevertheless, a big advantage of the 28-day solution are the nearly continuous time series of station positions. If a station does not observe during a week due to e.g. operational issues, it will not be present in the weekly solution. In the 28-day solution, it will not be present only if the station does not observe during four consecutive weeks. The results confirm that the longer the combination interval is, the less accurate is the sampling of short-term motions. In contrast to this, the long-term motions can be sampled very well with all sampling intervals.
4 4 Conclusions
ERFs are valuable to study the non-linear station motions which are suppressed in the conventional secular TRF. From the results shown in Sect. 3 we can conclude that the larger the sampling interval for the ERFs is, the better is the network geometry and therefore, the more LTs are introduced. These improvements contribute to a more stable realized geodetic datum. However, the shorter the sampling interval for the ERFs is, the better the short-term motions can be sampled. The characteristics of the different TRF realizations are summarized in Table 3 and some examples for suitable applications are given. We can conclude that:
-
MRFs (e.g. ITRF2008 Altamimi et al. 2011) are optimal for monitoring long-term changes in the Earth system such as sea level rise or tectonic plate motion.
-
The ERFs (28-day sampling) are able to monitor annual variations and post-seismic deformations. They provide a higher datum stability than the 7- or 14-day ERFs. Their accuracy is nearly consistent over time and they provide continuous time series of station positions for nearly every station. One disadvantage is the assumption of a constant position over 28 days which causes an error due to the neglected secular motion. The maximal error of 3 mm is obtained for the GPS station Easter Island (site velocity in ITRF2008 is ca. 5 mm per 28 days).
-
The ERFs (7-/14-day sampling) are able to monitor short-term station variations such as local environmental effects at costs of the datum stability due to the sparse station networks and the low number of local ties per epoch. The sparse networks also cause gaps in some station position time series since not all stations observed every 7/14 days. The lower datum stability is especially a problem in the early 1990s, when the station networks in general have not been homogeneously distributed.
A possibility to solve the datum problems in the short-term ERFs would be a denser network with more co-location sites and more frequently (accurately) measured LTs. Especially VLBI and SLR would benefit from larger networks. To improve SLR, observations to more satellites (only Etalon 1/2 and LAGEOS 1/2 are currently used for TRFs Bloßfeld et al. 2013) might also help.
References
Altamimi Z, Collilieux X, Métivier L (2011) ITRF2008: an improved solution of the international terrestrial reference frame. J Geod 85(8):457–473. doi:10.1007/s00190-011-0444-4
Bawden GW, Thatcher W, Stein RS, Hudnut KW, Peltzer G (2001) Tectonic contraction across Los Angeles after removal of groundwater pumping effects. Lett Nat 412:812–815. doi:10.1038/35090558
Bevis M, Alsdorf D, Kendrick E, Fortes LP, Forsberg B, Smalley R. Jr, Becker J (2005) Seasonal fluctuations in the mass of the Amazon river system and earth’s elastic response. Geophys Res Lett 32:(L16308). doi:10.1029/ 2005GL023491
Bloßfeld M, Seitz M, Angermann D (2014) Non-linear station motions in epoch and multi-year reference frames. J Geod 88(1):45–63. doi:10.1007/ s00190-013-0668-6
Bloßfeld M, Štefka V, Müller H, Gerstl M (2013) Satellite Laser Ranging - A tool to realize GGOS? in this issue
Freymueller JT (2010) Active tectonics of plate boundary zones and the continuity of plate boundary deformation from Asia to North America. Curr Sci 99(12):1719–1732. ISSN: 0011-3891
Nothnagel A, Angermann D, Börger K, Dietrich R, Drewes H, Görres B, Hugentobler U, Ihde J, Müller J, Oberst J, Pätzold M, Richter B, Rothacher M, Schreiber U, Schuh H, Soffel M (2010) Space-time reference systems for monitoring global change and for precise navigation. Mitteilungen des Bundesamtes für Kartographie und Geodäsie, Band 44, Verlag des Bundesamtes für Kartographie und Geodäsie, ISBN: 978-3-89888-920-9
Petit G, Luzum B (2010) IERS Conventions(2010). IERS Technical Note No. 36, Verlag des Bundesamtes für Kartographie und Geodäsie, ISBN: 978-3-89888-989-6
Sánchez L, Seemüller W, Seitz M (2012) Combination of the weekly solutions delivered by the SIRGAS processing centres for the SIRGAS-CON reference frame. In: Kenyon S, Pacino MC, Marti U (eds) Geodesy for planet earth. IAG symposia, vol 136, pp 845–851. Springer, Berlin. doi:10.1007/978-3-642-20338-1_106
Seitz M, Angermann D, Bloßfeld M, Drewes H, Gerstl M (2012) The DGFI Realization of ITRS: DTRF2008. J Geod 86(12):1097–1123. doi:10.1007/ s00190-012-0567-2
Tregoning P, van Dam T (2005) Effects of atmospheric pressure loading and seven-parameter transformations on estimates of geocenter motion and station heights from space geodetic observations. J Geophys Res 110:(B3). doi:10.1029/2004JB003334
Acknowledgements
The work contributes to the research group ‘Space-Time Reference Systems for Monitoring Global Change and for Precise Navigation’ (FOR 1503) Nothnagel et al. (2010) of the German Research Foundation. The authors want to thank the three reviewers and the editor for their suggestions.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Bloßfeld, M., Seitz, M., Angermann, D. (2015). Epoch Reference Frames as Short-Term Realizations of the ITRS. In: Rizos, C., Willis, P. (eds) IAG 150 Years. International Association of Geodesy Symposia, vol 143. Springer, Cham. https://doi.org/10.1007/1345_2015_91
Download citation
DOI: https://doi.org/10.1007/1345_2015_91
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-24603-1
Online ISBN: 978-3-319-30895-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)