
Abstract
GFZ as part of the GRACE Science Data System (SDS) is routinely processing time-variable global gravity field models on monthly and weekly basis throughout the whole GRACE mission period. These operational products consist of spherical harmonic coefficients which are calculated based on the so-called dynamic method, i.e. integration of variational equations. As a matter of fact, these coefficients are imperfect due to different error sources such as inaccurate background models, instrument noise and inhomogeneous sampling and thus have to be filtered during post-processing in an appropriate way. Nevertheless, the current release named GFZ RL05 shows significant improvements compared to its precursors with an average error level of only about a factor of 6 above the pre-launch estimated baseline accuracy.
Additionally, an alternative approach using radial basis functions is developed at GFZ. This approach is based on the inversion of integral equations using gradient differences as in-situ observations. The resulting gravity field products can be directly derived as gridded data making this approach also suitable for regional applications. No post-filtering is necessary, as regularization is already applied during system inversion. Additionally applying a Kalman filter, higher temporal resolution can be achieved.
This paper gives a brief overview of the methodology of both approaches and their particular strengths and weaknesses are discussed. Results from GFZ RL05 and the latest results of the radial basis function approach are compared and also validated against independent data sources.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The main objective of the GRACE mission (Tapley et al. 2004) consists of monitoring the temporal variations of the Earth’s gravity field. During the past decade, an increasing number of different GRACE releases generated by different groups have become available. The temporal resolution of these releases varies from monthly over 10-day and weekly to even daily gravity field solutions, whereas their spatial resolution naturally increases with lower temporal resolution or by applying any type of regularization but is generally limited to a few 100 km. Moreover, different approaches of gravity field recovery are applied by the processing centers. An overview of the most important approaches is given in Table 1. Although differences between different solutions have become smaller with every new release, they are still present. However, they cannot be simply explained by the different approaches alone, as background models and standards are also not consistent.
In this paper, two different approaches based on the same background models are compared. The first is the dynamic method, which has been used at GFZ for the operational GRACE processing since many years (Sect. 2). The second is an alternative approach based on radial basis functions (Sect. 3) which has recently been developed at GFZ (Gruber et al. 2014). Using the same background models, one can expect very similar results in case that both approaches overcome known shortcomings concerning the availability of satellite gravity data in view of the subtle temporal gravity field variations. This can either be achieved by a posteriori destriping and smoothing or by introducing spatial and temporal constraints during the solution process beforehand. On the other hand, possible differences can be related to the approaches and thus indicate their potential strengths and weaknesses. This is investigated in Sect. 4, where the results of both methods are compared and validated against independent data.
2 Dynamic Method
At GFZ, both monthly and weekly global GRACE gravity field models are operationally processed within the GRACE Science Data System (SDS) using the dynamic method (see Table 1). Its application to GRACE data is described e.g. in Reigber et al. (2005) or Schmidt (2007). Briefly summarized, this approach is based on numerical integration of the satellites’ equations of motion and the corresponding variational equations. Then, by setting up the linearized observation equations, the unknowns, i.e. gravity field, orbit and instrument specific parameters, can be solved in a least squares adjustment. The resulting gravity field solutions are obtained in form of spherical harmonic coefficients which can be transferred to gridded values of the desired gravity field functional such as geoid undulations or gravity anomalies. However, an appropriate smoothing of the solutions has to be applied, as the derived grids are degraded by meridional striping and artefacts mainly caused by the anisotropic observation geometry of GRACE.
The current release of monthly and weekly gravity field models labelled as GFZ RL05 shows clear improvements compared to its precursor GFZ RL04, in particular when looking at the noise level which has been significantly reduced. The average RL05 error level has dropped to only about a factor of 6 above the pre-launch estimated baseline accuracy (Kim 2000), whereas this factor has been around 15 for RL04. The improvements are the results of several modifications w.r.t. RL04 described in Dahle et al. (2014) and can be summarized in the following six groups of changes, denoted as Mod1, Mod2, …, Mod6, resp.:
-
Update of GFZ’s Earth Parameter and Orbit System software (EPOS-OC), mainly due to implementation of IERS2010 standards (Mod1)
-
Use of reprocessed GRACE Level-1B data (L1B RL02, provided by JPL) (Mod2)
-
Improved GPS processing (Mod3)
-
Updated background models (Mod4)
-
Modified relative weighting of GPS and K-band range rate observations (Mod5)
-
Modified parameterization of accelerometer biases (Mod6)

Degree variances for the April 2008 monthly solution in terms of geoid height [mm]; Mod1, Mod2, …, Mod6 represent the individual contribution of the corresponding modification with GFZ RL04 as reference, RL05a is the sum of all six modifications, and RL05 is the latter with fixed orbit parameters
The individual contributions of these modifications are quantified in Fig. 1. In addition, further notable noise reduction has been achieved by keeping all orbit parameters fixed in the final run and solving only the gravity field parameters. This strategy requires an already good, i.e. sufficiently close to the geophysical truth, a priori information for the background gravity field model. For RL05, this is the case as EIGEN-6C (Shako et al. 2014) including its time-variable part is used. However, fixing the orbit parameters also regularizes the solutions towards the a priori model (Meyer et al. 2015). This effect has become visible especially in the most recent years (2009 and later), where the linearly modelled trend of EIGEN-6C is deviating from the geophysical truth in certain areas. As a consequence, GFZ has decided to provide an alternative RL05a time-series, where orbit and gravity field parameters are estimated together.
3 Radial Basis Function Method
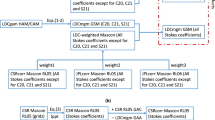
The basic idea behind the Radial Basis Function (RBF) method is the transformation of satellite instrument data to in-situ observables and subsequent inversion of gravity functionals, i.e. their corresponding integral equations, defined by reproducing kernels. Novák (2007) has already introduced a kernel function for the GRACE-type observation low-low satellite-to-satellite tracking (SST) based on inter-satellite range-accelerations (Rummel 1975). The application of the RBF method has been described in Gruber et al. (2014); in the following, only the most essential formulas are briefly introduced.
First, inter-satellite ranges ρ, range-rates \(\dot \rho\) and range-accelerations \(\ddot \rho\) taken from GRACE KBR1B-products as well as inter-satellite velocity differences \(\vert \delta \boldsymbol{\dot{r}}\vert\) are transformed to in-situ observables representing gradient differences of the gravity potential ϕ between the two GRACE spacecrafts:
with \(\boldsymbol{r}_{A}\), \(\boldsymbol{r}_{B}\) the geocentric position vectors of GRACE-A and -B, resp., and \(\boldsymbol{e}_{\text{LOS}}\) the unit vector in line-of-sight (LOS). The integral equation
describes the relation between the potential ϕ at grid points Q located at the Earth’s surface S, approximated by the bounding sphere R (assuming that all relevant gravitational masses are embedded inside this surface) and the gravity functional f at the evaluation points P with the corresponding radius r P . The chosen grid is equiareal to reduce the number of grid points by about 30% compared to an equiangular version. The reproducing kernel K(P, Q) reads
with the Legendre polynomial P n (cosψ), depending on degree n and the spherical distance ψ between P and Q.
As the potential values at the grid points Q are the unknowns to be solved for, Eq. (2) has to be inverted. This is achieved by least squares adjustment. Because the normal equation system is ill-posed, regularization is required. This can either be achieved by a Tikhonov regularization or by adopting a Kalman filter system evolving the a priori values of the normal equation system. Whereas the former is a suitable choice for monthly solutions, using a Kalman filter enables a higher temporal resolution.
For this work, daily global Kalman filtered RBF solutions have been generated first. The feasibility of solutions with daily resolution has been shown by Kurtenbach et al. (2009). For the prediction step, covariance information for the relevant sources of mass change is required. The spatial correlations between the grid points are directly present in the kernel matrix. Estimates for the temporal correlations are derived from a hydrology model (WGHM, Döll et al. 2003), from the atmosphere and ocean de-aliasing model (AOD1B, Flechtner et al. 2014) and from other available GRACE time-series (here: GFZ RL05). Dynamic GRACE orbits, needed in Eq. (1), and corresponding background forces to reduce the in-situ observations are also taken from GFZ RL05 processing. No time-variable gravity field background model has been reduced, as the Kalman filter stochastically predicts the a priori state using the most recent estimate of the state vector.
In a second step, monthly global RBF solutions have been inverted. The daily RBF solutions are removed as additional de-aliasing product and the variances obtained from the Kalman filter serve as input for a Tikhonov regularization. The appropriate signal amplitudes are found in an optimal sense by determining a global regularization parameter using an empirical L-curve criterion to minimize the norm of the residuals and unknowns. It is worth mentioning that the generation of monthly RBF solutions is generally independent, i.e. it is not necessary to generate daily RBF solutions first, as the information for the Tikhonov regularization can also be taken from other sources, e.g. geophysical models or GRACE.

Average monthly degree variances over the period 2003–2012 in terms of water column [mm] for RBF solutions (dashed dark grey), RBF solutions with degrees 2 till 6 from EIGEN-6C (solid dark grey) and RL05 solutions (solid light grey)

RMS of EWH values [mm] in central Sahara for RL05 monthly (green) and weekly (blue) solutions and RBF monthly (orange) and daily (purple) solutions

Basin averages in terms of EWH [mm] in the Amazon basin for RL05 (green) and RBF (orange) monthly solutions and WGHM (blue)

Basin averages in terms of EWH [mm] in Bangladesh for RL05 (green) and RBF (orange) monthly solutions and WGHM (blue)
In general, the RBF method turns out to be stable even in case of poor ground track and sample coverage. Moreover, several observation types (gravity, geometry) from multiple, both space-born and terrestrial, sensor systems can be combined and commonly integrated. Global as well as regional gravity field solutions can be computed.
4 Comparison and Validation
For comparison and validation of results from GFZ RL05 and RBF, corresponding time-series spanning ten years (2003–2012) are analyzed. The monthly and weekly RL05 solutions have been smoothed with the DDK2 decorrelation filter (Kusche et al. 2009). The DDK2 filter has been chosen as a good compromise between signal preservation and noise suppression. Its corresponding filter radius of approx.340 km matches well the spatial resolution where the level of mm-geoid accuracy is reached for RL05 (Dahle et al. 2014). As mentioned in Sect. 3, the RBF solutions are already regularized and therefore no additional smoothing has to be applied.
First, the average monthly degree variances of both approaches are compared (Fig. 2). In order to do so, the RBF solutions, obtained as grids, have been converted into the spectral domain by spherical harmonic analysis. It becomes obvious that the RBF solutions have less power in the long wavelengths. A possible reason might be that in the RBF processing only GRACE K-band observations are used whereas GPS observations, which are essential for solving for the low degrees in the dynamic method, are omitted so far. Expanding the RBF method by GPS observations, i.e. adding orbital information in form of the equation of motion, could help in future to overcome this issue. To avoid systematic effects caused by these low degree deficiencies, the potential coefficients from degree 2 till 6 of the RBF solutions have been replaced by corresponding coefficients taken from EIGEN-6C for all further comparisons presented in this work. In the medium wavelengths (around 1,000 km spatial resolution), both methods deliver almost identical results indicating that GRACE has generally its highest sensitivity in this part of the gravity field spectrum. Looking at the shorter wavelengths, the RBF solutions show a potentially higher spatial resolution, as the smoothing applied to the RL05 solutions is damping the power in the higher degrees not only suppressing noise but likely also signal.
In order to compare the noise level of the different time-series, the root mean square (RMS) of equivalent water height (EWH) values located within central Sahara (where almost no mass variability is expected) have been computed (Fig. 3). The RL05 monthly time-series has the lowest noise level, but the monthly RBF solutions are very comparable for most epochs. The largest RMS values can be seen for the RL05 weekly solutions whose noise level is rather randomly distributed. The daily RBF solutions are strongly correlated with their monthly counterpart, although with sometimes larger peaks. Both RBF time-series show systematic variations possibly caused by seasonal changes of the variance of the WGHM model entering the prediction step of the daily solutions and subsequently also affecting the monthly ones. The mean noise level of all four time-series lies within 1–2 cm of EWH.
In Figs. 4 and 5, resp., basin averages of monthly RL05 and RBF solutions for Amazon and Bangladesh are plotted. Correlations between RL05 and RBF are very high (Amazon: 98%, Bangladesh: 95%), and the correlations with (unsmoothed) monthly WGHM model output are also relatively good (see Table 2) with RL05 performing slightly better. Amplitude differences between RL05 and RBF are generally rather small. WGHM obviously shows more pronounced year to year variations of the amplitudes. In case of the Amazon basin, RL05 seems to better reflect these variations, whereas in Bangladesh RL05 and RBF amplitudes are almost similar. The basin averages of both submonthly time-series fit very smoothly to the corresponding monthly solutions (not shown).

Correlations between RBF and WGHM minus correlations between RL05 and WGHM; blue areas indicate higher correlations for RBF, red areas higher correlations for RL05

Amplitude differences between RBF and WGHM minus amplitude differences between RL05 and WGHM in terms of EWH [mm]; blue areas indicate smaller differences for RBF, red areas smaller differences for RL05
The comparable correlations of RL05 and RBF w.r.t. WGHM become also visible in Fig. 6, where the differences of these correlations are spatially plotted. Accordingly, these differences are close to zero in most regions and none of the two approaches outperforms the other in a global sense. More interesting conclusions can be drawn from Fig. 7 showing the spatial distribution of the difference of amplitude differences at each \(1^{\circ }\times 1^{\circ }\) grid point between RL05/RBF and WGHM. Amplitudes of the RBF solutions are much closer to WGHM in many regions, most prominently in the Amazon basin. From this, it can be concluded that the RBF approach is capable to better localize hydrological mass variations and suffers less from leakage effects and smearing of signal caused by smoothing.

Vertical deformations [mm] at IGS Station BRAZ (\(15.85^{\circ }\) S, 47. 88∘W) from GPS and monthly GRACE solutions

Vertical deformations [mm] at IGS Station NOVM (\(54.85^{\circ }\) N, \(82.91^{\circ }\) E) from GPS and monthly GRACE solutions
It has to be stated that the WGHM model, like other hydrology models, cannot be considered as absolute truth and in several other publications GRACE data has been used to validate or even calibrate hydrology models (e.g. Werth et al. 2009). However, the focus of this work is on a relative comparison of different GRACE time-series rather than comparing GRACE with hydrology models. Furthermore, the discussion of Fig. 7 aims at the capability of the GRACE solutions to localize hydrology signals and in this context WGHM should perform better than GRACE and thus represent a suitable validation. The fact that stochastic a priori information from WGHM has entered the RBF solutions as described in Sect. 3 also does not affect the localization of hydrology signals in the solutions, i.e. better results for RBF can be considered as reasonable.

Vertical deformations [mm] at IGS Station KELY (\(66.85^{\circ }\) N, \(50.94^{\circ }\) W) from GPS and monthly GRACE solutions
Further validation against independent data is done by comparing vertical deformations from GPS and the GRACE time-series. The GPS data used is obtained from CODE Reprocessing (Steigenberger et al. 2011) and consists of daily coordinate time-series of IGS stations. This original data is transformed to vertical deformations, smoothed and averaged to monthly values. The RL05 and RBF models are also converted to vertical deformations according to Tesmer et al. (2011). As variations in the GPS time-series reflect also atmospheric effects, the GAA-product (Flechtner et al. 2014) has been re-added to the GRACE solutions. Results are exemplarily shown for the GPS stations BRAZ (Brasilia, Brazil), NOVM (Novosibirsk, Russia) and KELY (Kangerlussuaq, Greenland) in Figs. 8, 9 and 10. The corresponding correlations are listed in Table 3. Again, RL05 and RBF solutions give very similar results and both are well in phase with mass variations derived from GPS.
Finally, the benefit of GRACE time-series with higher temporal resolution is illustrated in Fig. 11. It shows EWH variations in an area of approx. (500 × 500) km2 size around the epicenter of the December 26th, 2004 Sumatra-Andaman earthquake. The event by itself is visible in all time-series, but the actual epoch of the earthquake cannot be captured exactly by the monthly solutions as these are 30-day averages. However, this becomes somewhat possible by analyzing the weekly and particularly the daily solutions. The latter capture the sudden mass change in the vicinity of the earthquake exactly at the actual epoch of this event and might allow for an improved description of the characteristics of such events. Although this is still work in progress, the daily Kalman solutions impart a viable enhancement, e.g. for applications which demand a higher temporal resolution.

Averages in terms of EWH [m] in an area around the epicenter of the 2004 Sumatra-Andaman earthquake (\(2^{\circ }- 6^{\circ }\) N, \(94^{\circ }- 98^{\circ }\) E) for monthly RL05 and RBF solutions, weekly RL05 solutions and daily RBF solutions; the actual day of the earthquake is denoted by the black circle
5 Summary and Conclusions
Two methods of gravity field recovery from GRACE have been compared: (1) the dynamic method, with GFZ RL05 used here as example, and (2) the RBF method.
The former is a standard method for gravity field processing, well-established over years, and therefore can be regarded as benchmark in case of global gravity field solutions. Its drawbacks are a relatively high computational effort, a limited spatial resolution as smoothing is required and the fact that only global solutions can be obtained.
The latter method is a new alternative approach based on inversion of integral equations with a comparatively low computational effort. The conversion of GRACE K-band observations to in-situ gravitational observations works well, as the results from the RBF method are in generally very good agreement with results from GFZ RL05. Furthermore, this approach can be used for both global and regional applications. A higher temporal resolution can be achieved by employing a Kalman filter. Considering the fact that the RBF solutions are directly given in form of gridded gravity functionals with no further smoothing needed, they appear to be more user-friendly than the standard GRACE SDS solutions. The constraining by WGHM of course adds information to the spectral density of the RBF solutions but does not predefine their spatial distribution. They are thus forced to comply with those phenomena that most likely occur on short time scales where dominant mass redistributions of the Earth system obviously stem from continental, oceanic and atmospheric hydrology. It is then arguable that the RBF method is less suitable to derive secular trends or large-scale mass anomalies, but for short-term or even singular events such as megathrust Earthquakes it provides reasonable results. On the contrary, the post-filtering of the standard spherical harmonic solutions, which is effectively a bandpass filter, directly affects the signals’ localization by annihilating higher resolution. Dealing with this leakage is a challenge with equal incertitude.
Results from both approaches have been validated against independent data. According to amplitude differences w.r.t. the WGHM model, the RBF method has a potentially higher spatial resolution and shows a better localization of mass change signals. Comparisons with in-situ GPS vertical deformations show slightly better results for GFZ RL05 than for RBF. The RBF daily solutions clearly depict the event of the 2004 Sumatra-Andaman earthquake proving that they are capable to provide additional information compared to the standard monthly or weekly solutions.
To answer the question posed in the title of this manuscript, it can be concluded that the results are not the same, but very similar. As they are based on the same background models, the appearing differences should be caused by the different approaches themselves indicating that each approach has particular strengths and weaknesses.
References
Bettadpur S (2012) UTCSR level-2 processing standards document (for level-2 product release 0005). GRACE document 327–742. ftp://podaac.jpl.nasa.gov/allData/grace/docs/. Accessed 31 July 2013
Bruinsma SL, Lemoine J-M, Biancale R, Valès N (2010) CNES/GRGS 10-day gravity field models (release 02) and their evaluation. Adv Space Res 45:587–601. doi:10.1016/j.asr.2009.10.012
Dahle C, Flechtner F, Gruber C, König D, König R, Michalak G, Neumayer KH (2012) GFZ GRACE level-2 processing standards document for level-2 product release 0005. Scientific Technical Report STR12/02 - Data, Revised Edition, January 2013, Potsdam, 21 p. doi:10.2312/GFZ.b103-1202-25
Dahle C, Flechtner F, Gruber C, König D, König R, Michalak G, Neumayer KH (2014) GFZ RL05: An Improved Time-Series of Monthly GRACE Gravity Field Solutions. In: Flechtner F et al (eds) Observation of the system earth from space – CHAMP, GRACE, GOCE and Future Missions, Advanced Technologies in Earth Sciences. Springer, Berlin/Heidelberg. doi:10.1007/978-3-642-32135-1_4
Döll P, Kaspar F, Lehner B (2003) A global hydrological model for deriving water availability indicators: model tuning and validation. J Hydrol 270:105–134. doi:10.1016/S0022-1694(02)00283-4
Flechtner F, Dobslaw H, Fagiolini E (2014) AOD1B Product Description Document for Product Releases 05 (Rev. 4.2). GRACE Document 327–750
Gruber C, Moon Y, Flechtner F, Dahle C, Novák P, König R, Neumayer KH (2014) Submonthly GRACE Solutions from Localizing Integral Equations and Kalman Filtering. In: Rizos C and Willis P (eds) Earth on the edge: science for a sustainable planet, international association of geodesy symposia, vol 139. Springer, Berlin/Heidelberg. doi:10.1007/978-3-642-37222-3_51
Kim J (2000) Simulation study of a low-low satellite-to-satellite tracking mission. Dissertation, University of Texas, Austin
Kurtenbach E, Mayer-Gürr T, Eicker A (2009) Deriving daily snapshots of the Earth’s gravity field from GRACE L1B data using Kalman filtering. Geophys Res Lett 36:L17102. doi:10.1029/2009GL039564
Kusche J, Schmidt R, Petrovic S, Rietbroek R (2009) Decorrelated GRACE time-variable gravity solutions by GFZ, and their validation using a hydrological model. J Geodesy 83:903–913. doi:10.1007/s00190-009-0308-3
Liu X, Ditmar P, Siemes C, Slobbe DC, Revtova E, Klees R, Riva R, Zhao Q (2010) DEOS Mass Transport model (DMT-1) based on GRACE satellite data: methodology and validation. Geophys J Int 181:769–788. doi:10.1111/j.1365-246X.2010.04533.x
Mayer-Gürr T (2006) Gravitationsfeldbestimmung aus der Analyse kurzer Bahnbögen am Beispiel der Satellitenmissionen CHAMP und GRACE. Dissertation, University of Bonn
Meyer U, Jäggi A, Beutler G (2012) Monthly gravity field solutions based on GRACE observations generated with the celestial mechanics approach. Earth Planet Sci Lett 345:72–80. doi:10.1016/j.epsl.2012.06.026
Meyer U, Dahle C, Sneeuw N, Jäggi A, Beutler G, Bock H (2015) The effect of pseudo-stochastic orbit parameters on GRACE montly gravity fields – insights from lumped coefficents. Submitted to international association of geodesy symposia, VIII Hotine-Marussi Symposium, Rome, 2013
Novák P (2007) Integral inversion of SST data of type GRACE. Stud Geophys Geod 51:351–367. doi:10.1007/s11200-007-0020-9
Reigber C, Schmidt R, Flechtner F, König R, Meyer U, Neumayer KH, Schwintzer P, Zhu SY (2005) An earth gravity field model complete to degree and order 150 from GRACE: EIGEN-GRACE02S. J Geodyn 39:1–10. doi:10.1016/j.jog.2004.07.001
Rummel R (1975) Downward continuation of gravity information from satellite to satellite tracking or satellite gradiometry in local areas. Reports of the Department of Geodetic Science, vol 221. Ohio State University, Columbus, 50 pp
Schmidt R (2007) Zur Bestimmung des cm-Geoids und dessen zeitlicher Variationen mit GRACE. Dissertation, Scientific Technical Report STR07/04, April 2007, Potsdam, 141 p. doi:10.2312/GFZ.b103-07042
Shako R, Förste C, Abrikosov O, Bruinsma SL, Marty J-C, Lemoine J-M, Flechtner F, Neumayer KH, Dahle C (2014) EIGEN-6C: A High-Resolution Global Gravity Combination Model Including GOCE Data. In: Flechtner F et al (eds) Observation of the system earth from space – CHAMP, GRACE, GOCE and Future Missions, Advanced Technologies in Earth Sciences. Springer, Berlin/Heidelberg. doi:10.1007/978-3-642-32135-1_20
Steigenberger P, Hugentobler U, Lutz S, Dach R (2011) CODE contribution to the first IGS reprocessing campaign. Technical Report 1/2011, Institute for Astronomical and Physical Geodesy (IAPG), Technical University of Munich
Tapley BD, Bettadpur S, Watkins M, Reigber C (2004) The gravity recovery and climate experiment: mission overview and early results. Geophys Res Lett 31:L09607. doi:10.1029/2004GL019920
Tesmer V, Steigenberger P, van Dam T, Mayer-Gürr T (2011) Vertical deformations from homogeneously processed GRACE and global GPS long-term series. J Geodesy 85:291–310. doi:10.1007/s00190-010-0437-8
Watkins M, Yuan DN (2012) JPL level-2 processing standards document for level-2 product release 05. GRACE document 327–744. ftp://podaac.jpl.nasa.gov/allData/grace/docs/. Accessed 31 July 2013
Werth S, Güntner A, Petrovic S, Schmidt R (2009) Integration of GRACE mass variations into a global hydrological model. Earth Planet Sci Lett 277:166–173. doi:10.1016/j.epsl.2008.10.021
Acknowledgements
This work has been funded by the German Federal Ministry of Education and Research (BMBF) with support code 03F0654A.
We would like to thank the German Space Operations Center (GSOC) of the German Aerospace Center (DLR) for providing continuously and nearly 100% of the raw telemetry data of the twin GRACE satellites.
We would also like to thank the editor, M. Weigelt, as well as U. Meyer and two anonymous reviewers for their helpful comments improving this manuscript.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Dahle, C., Gruber, C., Fagiolini, E., Flechtner, F. (2015). Gravity Field Mapping from GRACE: Different Approaches—Same Results?. In: Sneeuw, N., Novák, P., Crespi, M., Sansò, F. (eds) VIII Hotine-Marussi Symposium on Mathematical Geodesy. International Association of Geodesy Symposia, vol 142. Springer, Cham. https://doi.org/10.1007/1345_2015_8
Download citation
DOI: https://doi.org/10.1007/1345_2015_8
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-24548-5
Online ISBN: 978-3-319-30530-1
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)