
Abstract
Two geodetic systems are now used on the Russian territory: Regional Geodetic Coordinate System (GSC-11) and geocentric coordinate system (PZ-90.11) for the GLONASS system and for different orbital calculations. The GSC network consists of 35 (50 in future) permanent fundamental sites, equipped with dual GPS/GLONASS receivers within 700–800 km distance from each other, and of about 300 first class geodetic points. Several sites of this network are already co-located with SLR, VLBI and DORIS stations, established on Russian territory with some additional co-locations to improve the accuracy and stability of the reference network in the near future. This network will fix the national coordinate system all over the country with mean square errors at the level of 1–5 cm for absolute coordinates and for relative positioning within errors of several mm. It is assumed to integrate this network with the ITRF and to realize the unified East European – North Asian Reference Frame. The improved global geocentric system PZ-90.11, which is now used for the GLONASS system, is fixed at the 2010 epoch. This system was obtained by the processing of a large amount of GPS, GLONASS, SLR and DORIS data, obtained at the Russian and international sites. The orientation of the coordinate axes, linear scale and origin of the system coincide with the ITRF system at the 0.5 cm-level. Transformation parameters between PZ-90.11, ITRF2008 and GSC-11 are considered.
GLONASS and GPS data, obtained at the 15 new sites of the Russian fundamental geodetic network during the 2013.5–2014.5 year, were processed separately with the use of PPP strategy. The differences between coordinates of the new Russian sites, estimated by only GPS or GLONASS measurements, are in the limits of 1–10 mm.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Two geodetic systems are now used on Russian territory: Regional Geodetic Coordinate System (GSC-11) and geocentric global coordinate system (PZ-90.11) for the GLONASS system and for different orbital and ballistic calculations (Boucher and Altamimi 2001). The GSC network consists of 35 (more than 50 in the nearest future) permanent core sites, equipped with dual GPS/GLONASS receivers. It is assumed to integrate this network with the ITRF and to realize the unified East European – North Asian Reference Frame. The positioning accuracy estimated by the use of GLONASS and GPS measurements, obtained at the new sites of the GSC-11, was analyzed and compared. The improved global geocentric reference system PZ-90.11, created by the State Geodetic Service, is now used for the GLONASS system. This system is fixed at the 2010.0 epoch and was obtained by the processing of a large amount of GPS, SLR and DORIS data (Noll 2010), obtained at the Russian and international co-located sites. Transformation parameters between PZ-90.11, ITRF2008 and GSC-11 are presented.
2 Geodetic Reference System GSC-11
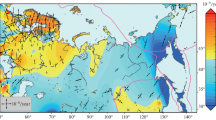
The main aims of the terrestrial geodetic system (GSC-11), which is developed now in Russia with the view of replace the systems CK-42 and CK-95 (Demyanov and Tatevian 2000), are the definition, realization and maintenance of the unified East European – North Asian Reference Frame, integrated with ITRF (Altamimi et al. 2011). Z-axis of this system is oriented to the conditional Pole (Petit and Luzum 2010) and X-axis is directed to the point of intersection of equatorial plane and zero meridian. The origin of GSC-11 system is a geometrical center of the Earth’s ellipsoid (Table 2). This geocentric coordinate system will fix the national geodetic coordinate system all over the country with mean square errors at the level of 1–5 cm for absolute coordinates and for relative positioning within errors of several mm. At present, the network consists of 35 (50 in the nearest future) fundamental permanent sites, equipped with dual GPS/GLONASS receivers, within 700–800 km distance from each other, and of about 300 first class geodetic points, augmented by hundreds of lower class points (Demyanov and Tatevian 2000). The fundamental sites are equally distributed with a special account of the local geodynamic activity (Fig. 1).

Permanent sites of the GSC network
Several sites of the network are already co-located with SLR, VLBI and DORIS stations, established on Russian territory, and some additional co-locations to improve the accuracy and stability of the reference network are expected in the nearest future. Normal heights, determined by precise leveling and gravimetric data at the core sites, are used for the level control. At the core sites of the network gravimetric measurements with the use of ballistic gravimeters will be repeated every 5 years. According to the Molodensky (1948) theory the value of a geodetic height above the general Earth ellipsoid, estimated by GNSS measurements, should strictly coincides with the sum of the normal height and quasi-geoid height. These data provide an independent control of the geocentric reference system.
The quasi geoid heights are estimated with the use of the global gravity field model. The last version of the global model has been developed at the Central Research Institute of Geodesy and Cartography (Moscow) in 2008 (Demyanov and Sermyagin 2009). Now the new version, estimated with use of GOCE data, is in preparation. The ellipsoid with a semi major axis equal to 6,378,136.5 ± 2–3 mm has been adopted for the GSC reference system.
3 Geocentric Global Coordinate System PZ-90.11
The geocentric coordinate system, as implemented in PZ-90.11, is a practical realization of the terrestrial reference frame at the epoch 2010.0. The PZ-90.11 is an improved version of the PZ-90.2 system. This frame is fixed by the sites of the global network, which includes all Russian GPS/GLONASS, SLR and VLBI sites, as well as a large number of IGS and DORIS sites. The accuracy of the PZ-90.11 geocentric coordinates is at cm level with a mean square error ~1–5 cm. Relative positions are estimated at 0.5–1.9 cm level. The orientation of coordinate axes, linear scale and origin of the system agrees with the ITRF system at the 0.5 cm level. Gravity field of the Earth in the PZ-90.11 is presented by the planetary models with spherical harmonics up to 70° (PZ-2002/70) and up to 360° (PZ-2002/360). The model PZ-2002/70 was obtained with the use of dynamic method of space geodesy through joined adjustment of a priori gravity model parameters and geocentric coordinates of the tracking sites. This model is recommended for orbital calculations. For the development of the (PZ-2002/360) model data from the available global catalogues of the mean gravity anomalies by 30′ × 30′ trapeziums have been analyzed together with tracking data. Parameters of the Earth’s ellipsoid and constants used for the PZ-90.11 and GSC-11 are shown in Table 1 and transformation parameters between PZ-90.2, PZ-90.11 and ITRF 2008 systems are shown in Table 2.
4 Processing of the GPS and GLONASS Data
GLONASS and GPS data, obtained at the 15 new sites of the Russian fundamental geodetic network during the 2013.5–2014.5 year, were analyzed at the Institute of astronomy (Moscow) (Kuzin et al. 2007; Tatevyan and Kuzin 2010). The stations are equally distributed and equipped with dual GPS/GLONASS receivers of different types (Table 3).
At the time of calculations there were 29 GLONASS satellites in constellation, including 23 operational satellites, 3 satellites in maintenance, 2 spares and one spacecraft in flight tests phase (). The spacecrafts are mostly of the GLONASS-M type. These satellites have a 7 year life span, power supply of 1,450 W, and clock stability at the level of \( 10^{-14} \). Second civil signal at L2 frequency band is added and the attitude control accuracy has been improved to 0.5°. An improved solar panel pointing (2°) provides the better dynamical model of satellite orbits and less level of unpredicted accelerations. An estimation of the GLONASS-M standards, comparable with those of GPS-II/IIA satellites, shows an optimistic trend to the achievement of GLONASS and GPS compatibility and interoperability in terms of stability and accuracy.
Daily measurements with 30 s recording of the data from every station have been processed with the use of GIPSY-OASIS II (Linux version 6.1.2), developed at the JPL (NASA) (Webb and Zumberge 1995). The strategy of the PPP (precise point positioning) (Zumberge et al. 1997) has been applied for the analyses of GPS and GLONASS measurements separately, with the use of utility gd2p.pl (GNSS data to position) of the software.
The models common for the analyses of the GPS and GLONASS data have been applied according to the IERS standards 2010 (Petit and Luzum 2010):
-
Epoch-2008;
-
Ocean tidal models
-
Solid Earth’s tides;
-
Troposphere model GPT2 (Lagler et al. 2013);
-
Ocean load pole tide model for station position;
-
Use second order ionosphere correction (IRI2021 model);
-
Troposphere horizontal gradients estimated stochastically with the use of “random walk” strategy;
-
Elevation angle for ground site −7°;
-
de-weight low elevation data (weight ={1/sqrt(sin(e)})
-
Receiver’s phase center variations were accounted with use of IGS “antex” file (http://igscb.jpl.nasa.gov/igscb/station/general/antex14.txt);
-
The coordinates are referred to the IGS08 coordinate frame, which is very close to the ITRF2008;
-
The GPS Block II solar radiation pressure model was used for GLONASS satellites, with the assumption that the attitude control scheme is almost the same for GLONASS and GPS satellites.
However there are some differences in the process of GPS and GLONASS data analysis, namely:
-
For GPS solutions the transmitter clock parameters and GPS orbit were fixed to the precise ephemeris and clock corrections, produced at the JPL with the use of IGS/FLINN (Fiducial Laboratorial International Natural-Science Network) data.
-
GPS solutions account ambiguities of the phase measurements, but for GLONASS – these corrections not accounted for.
-
Until recently the IGS data analysis center at the JPL didn’t produce clock corrections for GLONASS solutions.
-
For GLONASS solutions we have used clock corrections and orbits, provided by the GFZ/Potsdam Analytical IGS center.
Outcome of the performed computations shows that mean square residuals (rms) of the new sites of the Russian geodetic network were determined with the precision (rms) 1–10 mm by the use of measurements during one year time period. The differences between coordinates of the new Russian sites, estimated by only GPS or GLONASS measurements, are in the same limits, but they are strongly dependant on the amount and time period of measurements (Table 4).
5 Summary
The regional terrestrial reference frame, covering the large territory from the European part of Russia to the North-Eastern border of the Eurasian plate, will provide a representative covering of the largest stable areas (the Siberian and the East European) of the Eurasian plate. The precise data, obtained at the permanent sites, will provide more information for monitoring and studies of the tectonic movements in Eastern Siberia and along the Alaska-Aleutian-Kurils ark. This geodynamical active region requires attention to disaster risk reduction by all countries of the North Pacific. The Russian fundamental geodetic network is considered as a component of the multinational Circum-Pacific geodetic monitoring network that could operate in real time.
References
Altamimi Z, Collilieux X, Metivier L (2011) ITRF2008 an improved solution of the International terrestrial reference frame. J Geod 85:457–473. doi:10.1007/s00190-011-0444-4
Boucher C, Altamimi Z (2001) ITRS, PZ-90 and WGS 84: current realizations and the related transformation parameters. J Geod 75(11):613–619
Demyanov GV, Sermyagin R (2009) Planetary models of the Earth’s gravity field. Geod Cartogr 10:8–12 (in Russian)
Demyanov GV, Tatevian SK (2000) Integrated geodynamical network in Russia. (Scientific objectives and realization). Phys Chem Earth (A) 25(12):819–822
Kuzin S, Revnivykh S, Tatevian S (2007) GLONASS as a key element of the Russian positioning service. Adv Space Res 39(10):1531–1538
Lagler K et al (2013) GPT2: empirical slant delay model for radio space geodetic techniques. Geophys Res Lett 40:1069–1073. doi:10.1002/grl.50288
Molodensky MS (1948) Outer gravity field and figure of the physical Earth’s surface. Izvestiya RAS 12(3):193–211 (in Russian)
Noll CE (2010) The crustal dynamic data information system: a resource to support scientific analysis using space geodesy. Adv Space Res 45:1421–1440
Petit G, Luzum B (eds) (2010) IERS conventions, IERS Technical Note 36, Frankfurt am Main: Verlag des Bundesamts fur Kartographie und Geodasie, 179 pp, ISBN 3-89888-989-6
Tatevyan S, Kuzin S (2010) On the combined use of GPS/GLONASS techniques for the development of the Russian geodetic reference network. In: Kenji S (ed) Advances in geosciences, vol 26. WSPC, pp 23–32
Webb F, Zumberge J (eds) (1995) An introduction to GIPSY-OASIS II. Report JPLM D-11088, Jet Propulsion Laboratory, Pasadena
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5016
Acknowledgments
Authors express gratitude to the colleagues from the Central Research Institute of Geodesy and Cartography (Moscow) for the information on the GSC and PZ-90.11 systems and measurement data from the GSC sites.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this paper
Cite this paper
Tatevian, S., Kuzin, S. (2015). A Development of the Russian Geodetic Reference Network. In: van Dam, T. (eds) REFAG 2014. International Association of Geodesy Symposia, vol 146. Springer, Cham. https://doi.org/10.1007/1345_2015_181
Download citation
DOI: https://doi.org/10.1007/1345_2015_181
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-45628-7
Online ISBN: 978-3-319-45629-4
eBook Packages: Earth and Environmental ScienceEarth and Environmental Science (R0)