
Abstract
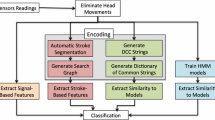
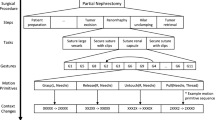
This paper addresses automatic skill assessment in robotic minimally invasive surgery. Hidden Markov models (HMMs) are developed for individual surgical gestures (or surgemes) that comprise a typical bench-top surgical training task. It is known that such HMMs can be used to recognize and segment surgemes in previously unseen trials [1]. Here, the topology of each surgeme HMM is designed in a data-driven manner, mixing trials from multiple surgeons with varying skill levels, resulting in HMM states that model skill-specific sub-gestures. The sequence of HMM states visited while performing a surgeme are therefore indicative of the surgeon’s skill level. This expectation is confirmed by the average edit distance between the state-level “transcripts” of the same surgeme performed by two surgeons with different expertise levels. Some surgemes are further shown to be more indicative of skill than others.
Chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
References
Reiley, C., Lin, H., Varadarajan, B., Khudanpur, S., Yuh, D.D., Hager, G.D.: Automatic recognition of surgical motions using statistical modeling for capturing variability. In: MMVR (2008)
Shuford, M.: Robotically assisted laparoscopic radical prostatectomy: a brief review of outcomes. Proc. Baylor University Medical Center 20(4), 354–356 (2007)
Lenihan Jr., J., Kovanda, C., Seshadri-Kreaden, U.: What is the Learning Curve for Robotic Assisted Gynecologic Surgery? J. Min. Inv. Gyn. 15(5), 589–594 (2008)
Martin, J., Regehr, G., Reznick, R., MacRae, H., Murnaghan, J., Hutchison, C., Brown, M.: Objective structured assessment of technical skill (OSATS) for surgical residents. British Journal of Surgery 84(2), 273–278 (1997)
Dosis, A., Bello, F., Gillies, D., Undre, S., Aggarwal, R., Darzi, A.: Laparoscopic task recognition using hidden markov models. In: MMVR (2005)
Richards, C., Rosen, J., Hannaford, B., Pellegrini, C., Sinanan, M.: Skills evaluation in minimally invasive surgery using force/torque signatures. Surgical Endoscopy 14, 791–798 (2000)
Rosen, J., Solazzo, M., Hannaford, B., Sinanan, M.N.: Task decomposition of laparoscopic surgery for objective evaluation of surgical residents’ learning curve using hidden markov model. Computer Aided Surgery 7(1), 49–61 (2002)
Lin, H.C., Shafran, I., Murphy, T.E., Okamura, A.M., Yuh, D.D., Hager, G.D.: Automatic detection and segmentation of robot-assisted surgical motions. In: Duncan, J.S., Gerig, G. (eds.) MICCAI 2005. LNCS, vol. 3749, pp. 802–810. Springer, Heidelberg (2005)
Fisher, R.A.: The use of multiple measurements in taxonomic problems. Annals of Eugenics 7, 179–188 (1936)
Rabiner, L.R.: A tutorial on hidden markov models and selected applications in speech recognition. Proceedings of the IEEE 77(2), 257–286 (1989)
Varadarajan, B., Khudanpur, S., Dupoux, E.: Unsupervised learning of acoustic sub-word units. In: Proceedings of ACL 2008: HLT, Short Papers, 165–168 (2008)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Electronic Supplementary Material
Supplementary material (244 KB)
Supplementary material (242 KB)
Supplementary material (89 KB)
Supplementary material (416 KB)
Supplementary material (410 KB)
Supplementary material (106 KB)
Supplementary material (120 KB)
Supplementary material (109 KB)
Rights and permissions
Copyright information
© 2009 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Varadarajan, B., Reiley, C., Lin, H., Khudanpur, S., Hager, G. (2009). Data-Derived Models for Segmentation with Application to Surgical Assessment and Training. In: Yang, GZ., Hawkes, D., Rueckert, D., Noble, A., Taylor, C. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2009. MICCAI 2009. Lecture Notes in Computer Science, vol 5761. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-04268-3_53
Download citation
DOI: https://doi.org/10.1007/978-3-642-04268-3_53
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-04267-6
Online ISBN: 978-3-642-04268-3
eBook Packages: Computer ScienceComputer Science (R0)